Merhabalar;
Arduino camiasının olmazsa olmazı LED yakıp söndürme uygulamasıyla karşınızdayız :)
İşe bağlantıların nasıl yapılması gerektiğinden başlayacak olursak :
 Direnç LED'i patlatmamak için eklendi, LED'in yanıp sönmesini baz alırsak direnç değerinin pek bir önemi yok. Parlaklığı etkilemek istersek direnç değeriyle oynayabiliriz.
Direnç LED'i patlatmamak için eklendi, LED'in yanıp sönmesini baz alırsak direnç değerinin pek bir önemi yok. Parlaklığı etkilemek istersek direnç değeriyle oynayabiliriz.
LED'in doğru takıldığından emin olunuz, zira ters bağlandığı vakit istediğimiz ışığı bulamıyoruz..
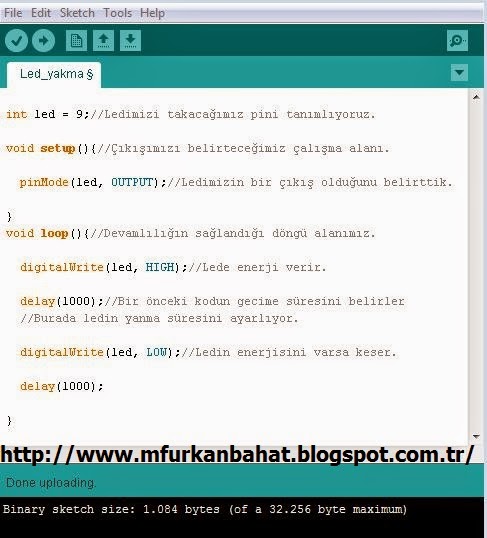
Koda gelecek olursak :
Arduino camiasının olmazsa olmazı LED yakıp söndürme uygulamasıyla karşınızdayız :)
İşe bağlantıların nasıl yapılması gerektiğinden başlayacak olursak :
LED'in doğru takıldığından emin olunuz, zira ters bağlandığı vakit istediğimiz ışığı bulamıyoruz..
Koda gelecek olursak :
Delay kodu ile oynayarak yanıp sönme süresini değiştirmekte fayda var, tam olarak ne yaptığımız konusunda fikir sahibi olmamıza yardımcı olacaktır.
*Burada 1000 sayısı 1 saniyeye denk gelmektedir.
Kodumuz :
int led = 9;//Ledimizi takacağımız pini tanımlıyoruz.
void setup(){//Çıkışımızı belirteceğimiz çalışma alanı.
pinMode(led, OUTPUT);//Ledimizin bir çıkış olduğunu belirttik.
}
void loop(){//Devamlılığın sağlandığı döngü alanımız.
digitalWrite(led, HIGH);//Lede enerji verir.
delay(1000);//Bir önceki kodun gecime süresini belirler
//Burada ledin yanma süresini ayarlıyor.
digitalWrite(led, LOW);//Ledin enerjisini varsa keser.
delay(1000);
}
Comments
Post a Comment